Posiciones relativas entre recta y plano
Reserva de 2010, Opción B ejercicio 4
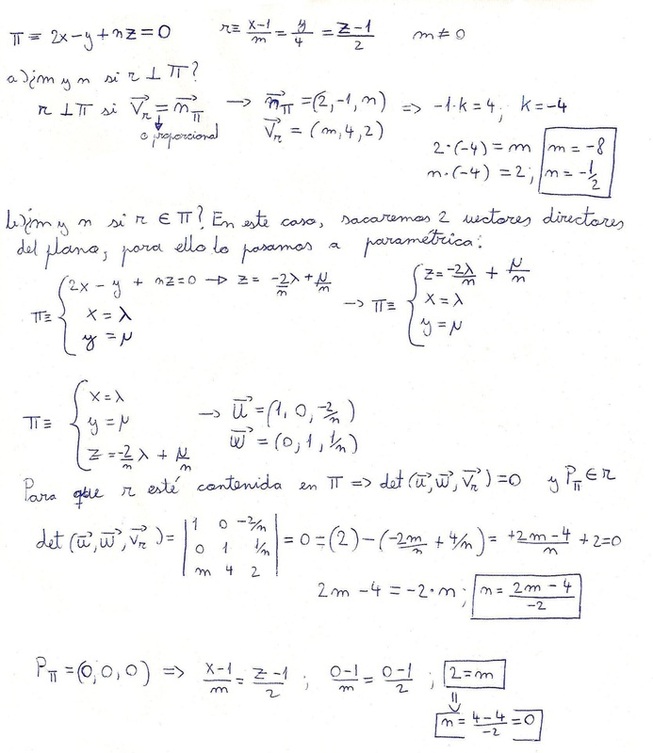
Considera el plano P definido por 2x-y+nz=0 y la recta r dada por: (x-1)/m=y/4= (z-1)/2 con m distinta de 0.
a) Calcula m y n para que la recta r sea perpendicular al plano P .
b) Calcula m y n para que la recta r esté contenida en el plano P.
Considera el plano P definido por 2x-y+nz=0 y la recta r dada por: (x-1)/m=y/4= (z-1)/2 con m distinta de 0.
a) Calcula m y n para que la recta r sea perpendicular al plano P .
b) Calcula m y n para que la recta r esté contenida en el plano P.
a) Calcula m y n para que la recta r sea perpendicular al plano P .
Para resolver este apartado tenemos que usar el vector director de la recta y el normal del plano P.
La recta será perpendicular al plano si su vector director es paralelo al vector normal del plano, cosa que ocurrirá si las componentes de estos son iguales o perpendiculares. La única componente cuya relación podemos establecer es y, con la que hallamos la constante de proporcionalidad entre ambos vectores k=-4, que multiplicada a las componentes del vector normal del plano nos permite obtener el vector director de la recta.. Aplicando esa constante a las componentes que sí conocemos obtenemos los valores de m (m=-8) y n (n=-1/2).
b) Calcula m y n para que la recta r esté contenida en el plano P.
En este apartado aplicaremos el procedimiento para hallar las posiciones relativas entre recta y plano. Para ello lo primero que necesitamos es pasar la ecuación del plano a forma paramétrica. Lo hacemos planteando un sistema de tres ecuaciones a partir de la ecuación dada, otorgando a x un valor lambda y a y un valor mu.
Así, obtendremos dos vectores del plano: u y w, con los que, junto al vector director de la recta formaremos una matriz cuadrada de orden tres cuyo determinante operaremos. Si este determinante da distinto de 0, recta y plano son secantes. Para que la recta esté contenida en el plano, igualamos a 0 el determinante.
Además, debe cumplirse que un punto cualquiera del plano esté contenido en la recta, de lo contrario ambos serían paralelos.
Así, realizamos un sistema de ecuaciones cuyos resultados son:
m=2
n=0
Para resolver este apartado tenemos que usar el vector director de la recta y el normal del plano P.
La recta será perpendicular al plano si su vector director es paralelo al vector normal del plano, cosa que ocurrirá si las componentes de estos son iguales o perpendiculares. La única componente cuya relación podemos establecer es y, con la que hallamos la constante de proporcionalidad entre ambos vectores k=-4, que multiplicada a las componentes del vector normal del plano nos permite obtener el vector director de la recta.. Aplicando esa constante a las componentes que sí conocemos obtenemos los valores de m (m=-8) y n (n=-1/2).
b) Calcula m y n para que la recta r esté contenida en el plano P.
En este apartado aplicaremos el procedimiento para hallar las posiciones relativas entre recta y plano. Para ello lo primero que necesitamos es pasar la ecuación del plano a forma paramétrica. Lo hacemos planteando un sistema de tres ecuaciones a partir de la ecuación dada, otorgando a x un valor lambda y a y un valor mu.
Así, obtendremos dos vectores del plano: u y w, con los que, junto al vector director de la recta formaremos una matriz cuadrada de orden tres cuyo determinante operaremos. Si este determinante da distinto de 0, recta y plano son secantes. Para que la recta esté contenida en el plano, igualamos a 0 el determinante.
Además, debe cumplirse que un punto cualquiera del plano esté contenido en la recta, de lo contrario ambos serían paralelos.
Así, realizamos un sistema de ecuaciones cuyos resultados son:
m=2
n=0
Posiciones relativas entre planos
Septiembre de 2010, Opción B, Ejercicio 4
Considera los planos P1, P2 y P3 dados respectivamente por las ecuaciones
P1:x + y = 1 P2:ay + z = 0 P3:x +(1+ a)y +az-a-1 =0
a) ¿Cuánto ha de valer a para que no tengan ningún punto en común?
b) Para a = 0, determina la posición relativa de los planos.
Considera los planos P1, P2 y P3 dados respectivamente por las ecuaciones
P1:x + y = 1 P2:ay + z = 0 P3:x +(1+ a)y +az-a-1 =0
a) ¿Cuánto ha de valer a para que no tengan ningún punto en común?
b) Para a = 0, determina la posición relativa de los planos.

a) ¿Cuánto ha de valer a para que no tengan ningún punto en común?
Para resolver este apartado recurriremos al Teorema de Rouché-Frobenius, que podéis consultar en el botón que hay bajo el enunciado.
Lo que haremos es construir un sistema de ecuacione sy una matriz con los tres planos. Sabemos que buscamos un valor de a para el cual obtengamos un punto que no exista en los tres planos, es decir, necesitamos que nuestro sistema no tenga solución: que sea incompatible (el rango de la matriz del sistema debe ser menor que el de la matriz ampliada).
Para ello, vemos para qué valores de a la matriz del sistema tiene un rango inferior a 3. Observamos que son dos valores los que cumplen esto: a=0 y a=1, y para los dos la matriz del sistema tiene rango 2.
No obstante, para a=0, el sistema es compatible indeterminado, ya que el rango de la matriz ampliada será igual al de la matriz del sistema e inferior al número de incógnitas. Esto es, el sistema tiene infinitas soluciones. Esto ocurre cuando dos de los planos son coincidentes y otro es secante, pero eso lo veremos en el próximo apartado.
Para a=1, el la matriz del sistema sí presenta rango 3, y el sistema es por tanto incompatible.
Para conocer la posición relativa de los tres planos, comprobamos su posición relativa dos a dos.
Dado que ninguno de los vectores normales, apreciables en los valores que acompañan a las incógnitas en las ecuaciones de los planos, son paralelos entre ellos ni coincidentes, podemos determinar que los planos son secantes dos a dos.
b) Para a = 0, determina la posición relativa de los planos.
En este caso, sabemos que el sistema que se forma es compatible determinado (ya lo hemos visto en el apartado anterior). Es decir, los tres planos tienen infinitos puntos en común (o lo que es lo mismo, se cortan en una recta). Al sustituir el valor de a en las ecuaciones de los planos, observamos que dos de ellas quedan iguales, es decir, dos de los planos serán coincidentes, y secantes al tercero.
Para resolver este apartado recurriremos al Teorema de Rouché-Frobenius, que podéis consultar en el botón que hay bajo el enunciado.
Lo que haremos es construir un sistema de ecuacione sy una matriz con los tres planos. Sabemos que buscamos un valor de a para el cual obtengamos un punto que no exista en los tres planos, es decir, necesitamos que nuestro sistema no tenga solución: que sea incompatible (el rango de la matriz del sistema debe ser menor que el de la matriz ampliada).
Para ello, vemos para qué valores de a la matriz del sistema tiene un rango inferior a 3. Observamos que son dos valores los que cumplen esto: a=0 y a=1, y para los dos la matriz del sistema tiene rango 2.
No obstante, para a=0, el sistema es compatible indeterminado, ya que el rango de la matriz ampliada será igual al de la matriz del sistema e inferior al número de incógnitas. Esto es, el sistema tiene infinitas soluciones. Esto ocurre cuando dos de los planos son coincidentes y otro es secante, pero eso lo veremos en el próximo apartado.
Para a=1, el la matriz del sistema sí presenta rango 3, y el sistema es por tanto incompatible.
Para conocer la posición relativa de los tres planos, comprobamos su posición relativa dos a dos.
Dado que ninguno de los vectores normales, apreciables en los valores que acompañan a las incógnitas en las ecuaciones de los planos, son paralelos entre ellos ni coincidentes, podemos determinar que los planos son secantes dos a dos.
b) Para a = 0, determina la posición relativa de los planos.
En este caso, sabemos que el sistema que se forma es compatible determinado (ya lo hemos visto en el apartado anterior). Es decir, los tres planos tienen infinitos puntos en común (o lo que es lo mismo, se cortan en una recta). Al sustituir el valor de a en las ecuaciones de los planos, observamos que dos de ellas quedan iguales, es decir, dos de los planos serán coincidentes, y secantes al tercero.
